땀과 열정이 만들어 낸 순간들
오늘도 써나가는
새로운 도전과 혁신의 기록
-

241231 official KIMIRo 2025 Season's Greetings
-

20240407 Ministry of Science and ICT - Card News
-
231229 official KIMIRo 2024 Season's Greetings
-
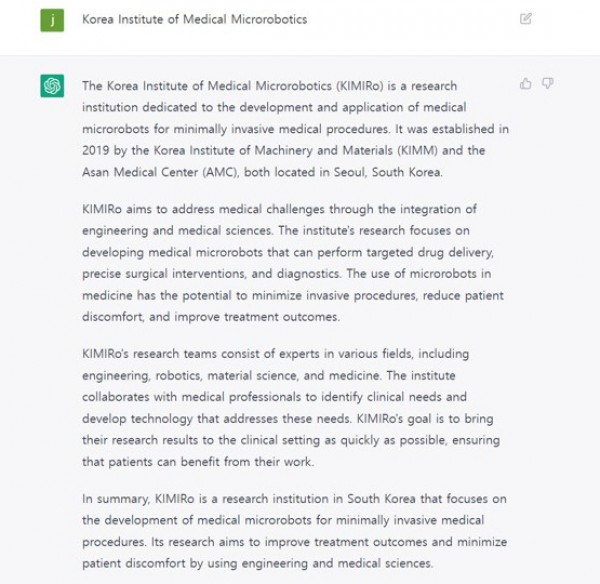
ChatGPT answers regarding KIMIRo and staff
-

Consultative Committee from KMDF
-

221230 KIMIRo year-end party
-

221226 Year-end party for KIMIRo Lab leaders
-

221223 Snowfall in Gwangju
-

221219 High school alumni association year-end party
-

221215 with old FhG IPA friend, Jens Neugebauer